DRAWING TRACK
In short
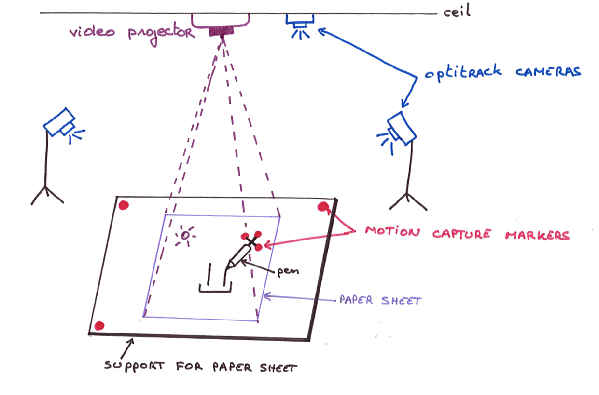
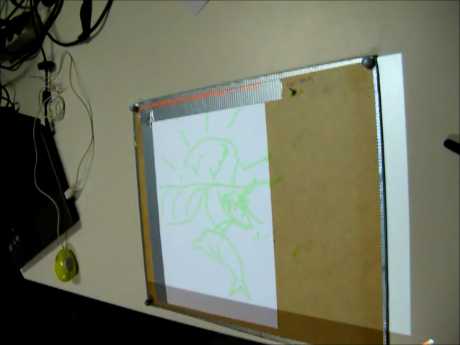
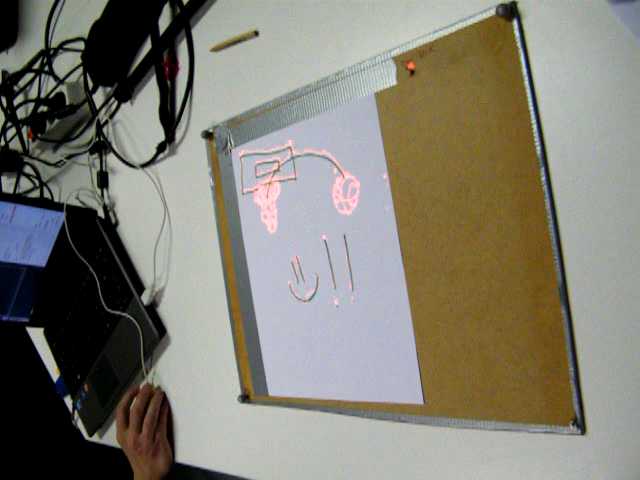
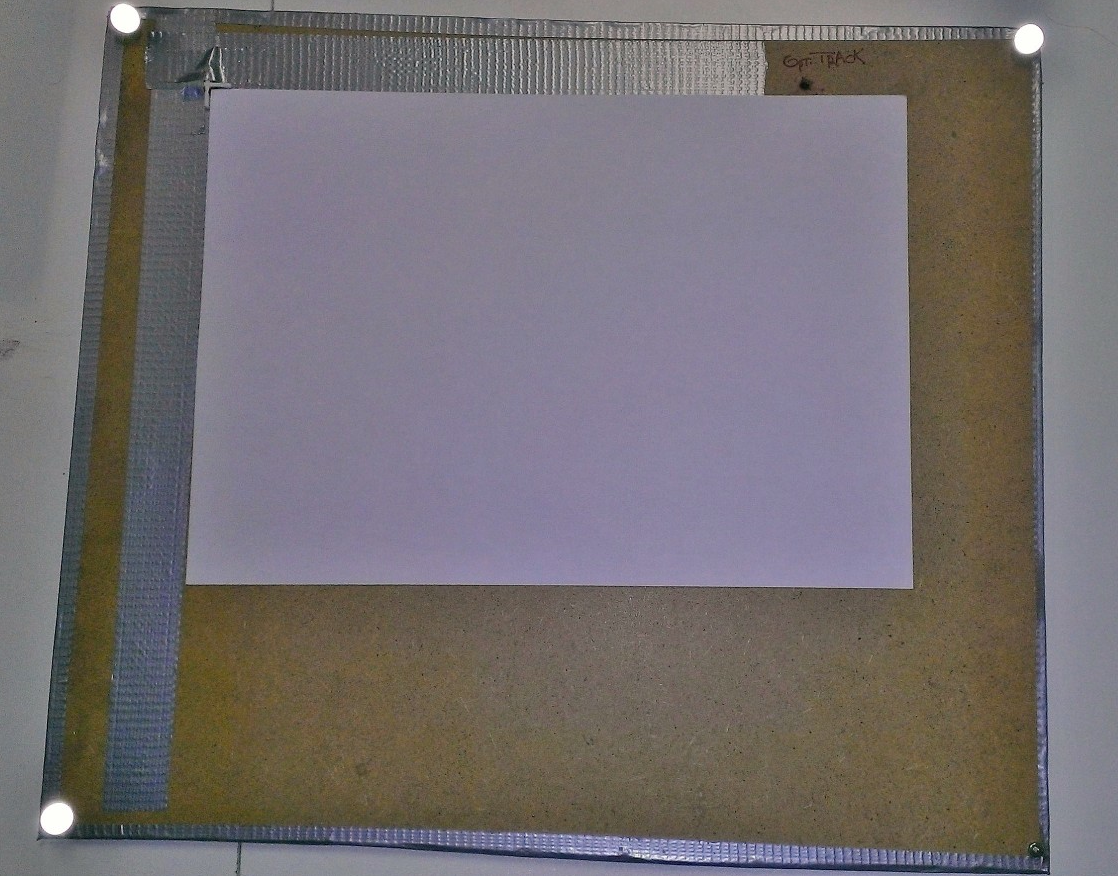
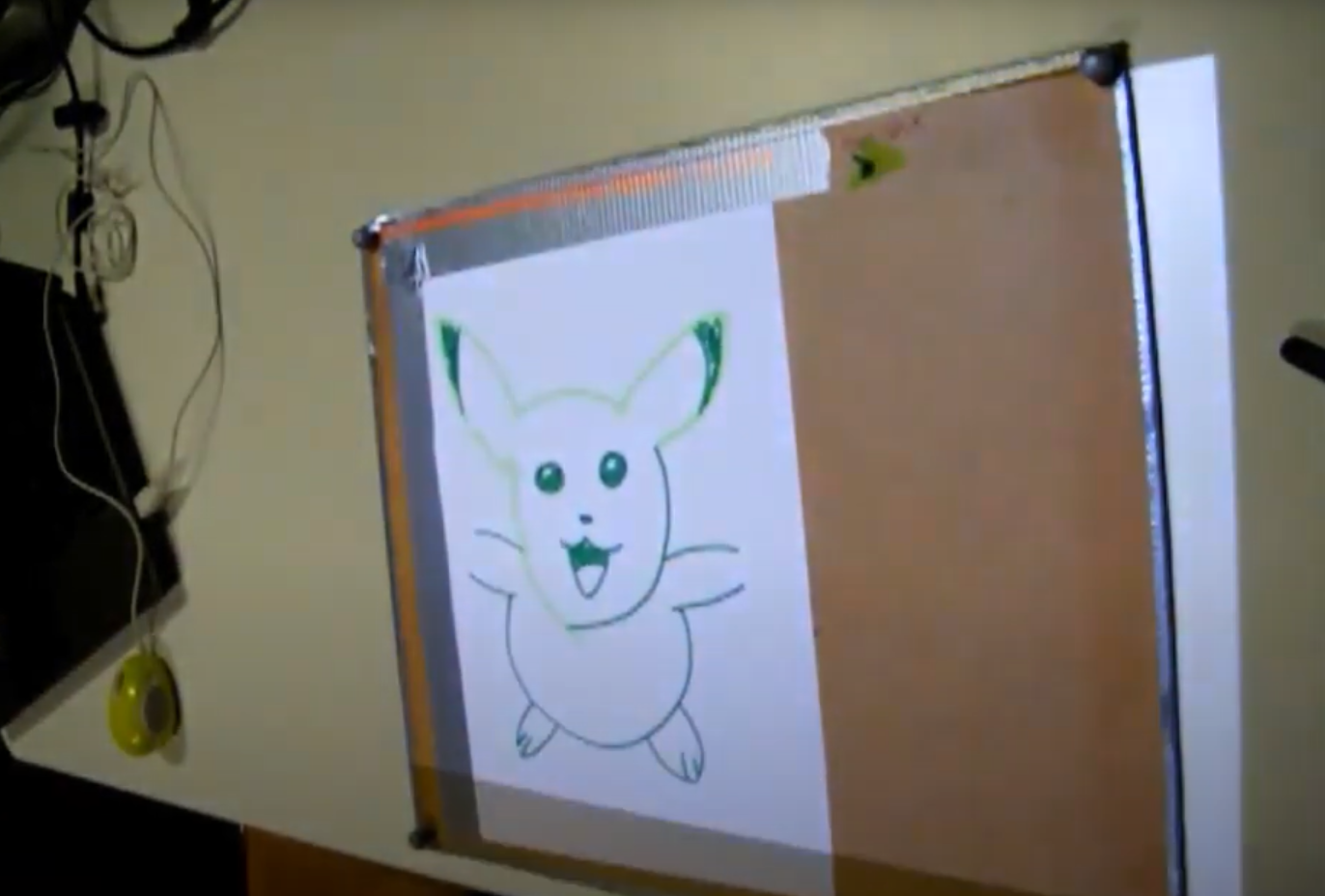
For a school project, I imagined and prototyped with 3 friends a computer assisted drawing system based on an OptiTrack. The idea was to provide a system able to capture a drawing on a computer without changing the artists' favorite tools : paper and pen.
About the project
This project was part of the courses about Post-WIMP interactions at Grenoble INP - ENSIMAG. This courses focuses on Human-Computer interactions other than Windows, Icons, Menus and Pointing device (WIMP).
For this project, we had to chose an interesting subject, do the research and develop a prototype using the availiable tools and materials of the school's fablab.
The software for the prototype was developped under Ubuntu with C++ using the Optitrack SDK, Qt and the Point Cloud Library.